





Iranian researchers at the University of Tehran unveiled yesterday the latest generation of their humanoid robot, named Surena III. In a demonstration, the adult-sized robot walked across a stage, imitated a person’s arm gestures, and stood on one foot while bending backwards.
伊朗德黑兰大学研究人员昨日发布新一代自研人形机器人 Surena III,在展示中可以看到,机器人有成人大小,在步行的过程中模仿人的手臂动作,在单脚立地时还会向后弯曲。
Dr. Aghil Yousefi-Koma, a professor of mechanical engineering who leads the Surena project, tells IEEE Spectrum that the robot is designed as a research platform to explore bipedal locomotion, human-robot interaction, and other challenges in robotics. He also hopes Surena can help show the importance of engineering careers to students and the public, adding that he views the robot as a symbol of technology advancement “in the direction of peace and humanity.”
机械工程学教授Aghil Yousefi-Koma是 Surena III项目带头人,他表示这款机器人的设计目的是作为探讨双足运动、人机交互和其他机器人学挑战课题的研究平台。他也希望,通过苏莱纳3( Surena III)可以显示工程学对于学生以及公众的重要性,并且还表示,在以和平与人文主义的前提下,机器人是技术进步的象征。

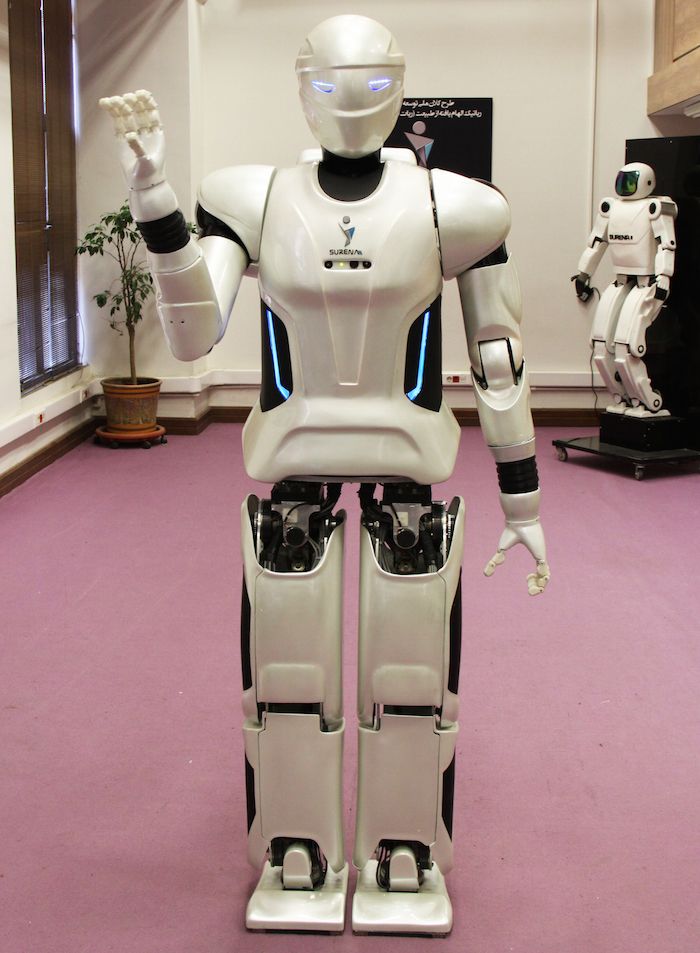
With a sleek plastic casing and bright LED eyes, Surena III is 1.9 meters (6 feet 3 inches) tall and weighs in at 98 kilograms (216 lbs). It’s equipped with a host of sensors, including a Kinect-based 3D vision module, and its joints are powered by 31 servomotors. The control software running on the robot and a monitoring system used by human operators to supervise its functions are based on the popular Robot Operating System, or ROS.
Surena III 身高1米9,重98公斤!有一个圆滑的塑料外壳和明亮的LED眼睛。它配备了一系列传感器,包括一个基于Kinect的3D视觉模块,其关节是由31个伺服电机驱动。控制软件和监控系统的运行是基于最流行的机器人操作系统(Robot Operating System)ROS。
Compared to some of the world’s most advanced humanoids, Surena seems to have more limited capabilities. Honda’s famed Asimo can run and hop on one foot, and a new, experimental humanoid the company is developing can even climb a vertical ladder. Several robots that participated in the DARPA Robotics Challenge, a disaster-response competition inspired by the Fukushima nuclear emergency, were able to perform tasks like driving a vehicle, operating power tools, and walking over a pile of bricks. These robots included Atlas, developed by Boston Dynamics (a company acquired by Alphabet); Carnegie Mellon’s CHIMP; and South Korea’s DRC-HUBO, the winner of the competition.
与世界上最先进的类人型机器人相比,苏莱纳3还显得能力有限。本田著名的ASIMO可以跑还可以单脚跳跃;还有一家新创的人形机器人公司开发出的机器人甚至可以爬上垂直的梯子。有的机器人参与了DARPA(美国国防先进研究项目局)的机器人挑战赛,应对类似日本福岛核泄露那样的灾难性事故,能够完成像驾驶车辆,操作电动工具,以及在瓦砾乱石上行走等等。这些机器人包括由Boston Dynamics(波士顿动力学公司,已被谷歌Alphabet公司收购)的人形机器人Atlas;卡耐基-梅隆大学的黑猩猩CHIMP;还有韩国的DRC-HUBO——darpa机器人挑战赛的获胜者!
Surena has yet to demonstrate that level of mobility and dexterity, but the Iranian humanoid has been making steady progress in the past seven years. The first version of the robot, unveiled in 2008, had only 8 degrees of freedom (DOF). Surena 2, announced in 2010, had 22 DOF and could walk at a pace of 0.03 meters per second. Now the third generation of the robot has 31 DOF and a walking speed nearly 10 times as fast, at 0.2 m/s.
苏莱纳Surena 尚未证明它的移动能力和灵活性,但伊朗的机器人技术在过去七年中已经取得稳定的进步。第一个版本的机器人是在2008推出,只有8度的自由度。Surena 2在2010日宣布,有22个自由度,可以在0.03米每秒的速度。现在第三代的机器人有31个自由度和近10倍的步行速度,最快达到0.2米/秒。
Dr. Yousefi-Koma, who heads University of Tehran’s Center for Advanced Systems and Technologies (CAST), where Surena was developed, says he followed the DRC events and, although Surena was not developed to participate in that competition, “one of the best applications for this robot may be employing it in disasters.”
德黑兰的先进的系统和技术中心大学的负责人(CAST)Yousefi-Koma博士说,他一直关注(DARPA机器人挑战赛)(DARPA Robotics Challenge, 简称DRC),虽然Surena 机器人现在还不足以参加DRC比赛,但它的最好应用也是在灾害救援上面。
He says Surena III, funded by the Industrial Development and Renovation Organization of Iran, is currently able to walk up and down stairs and ramps, adapt to irregularities on the ground, grasp objects, and also kick a soccer ball. He sent us footage showing some of those capabilities:
他说,由伊朗产业发展创新组织资助的Surena III,目前能够步行上下楼梯和坡道,适应不规则地面路径,能够抓取,还能踢足球。他给我们发送了一些能力的录像:
To build Surena III, the Iranian researchers significantly upgraded the robot’s sensors and actuators over the previous version. The vision system now allows the robot to detect faces and objects and track a person’s motions. A speech system can recognize some predefined sentences in Persian. Encoders embedded on all joints, six-axis force/torque sensors on the ankles, and an IMU on the torso help the robot remain stable. To power Surena’s hips and legs, the researchers used a combination of Maxon brushless dc motors, harmonic drives, and timing belt-pulley systems. The upper body uses ROBOTIS Dynamixel AX and MX servos.
为了开发Surena III,伊朗研究人员大大提高机器人的传感器和执行器。视觉系统现在可以让机器人来检测人脸和物体并跟踪一个人的运动。语音系统可以识别一些在波斯的预定义的句子。编码器嵌入在所有的关节,六轴力/力矩传感器的脚踝,和躯干上的IMU帮助机器人保持稳定。电力Surena的臀部和腿部,研究人员使用了一种结合MAXON直流无刷电机,谐波传动,同步带轮系统。上半身用的是ROBOTIS Dynamixel AX 和MX。
The group also completely revamped the software system. It’s now based on ROS, and Dr. Yousefi-Koma says it “enables the robot to simultaneously communicate with the environment, manage its behaviors, monitor its sensors, and detect unwanted faults in the system.” A supervisory system with a graphical interface allows the researchers to monitor all joints and sensors, and a SDK with integrated C++ libraries allows them to more easily create and test new behaviors for the robot.
开发团队也修改了软件系统。Yousefi-Koma 说,它基于ROS系统“使机器人与环境的交流,同时,管理其行为,监控传感器,检测系统意外故障。”一个图形界面允许研究人员监控所有节点和传感器监控系统,和一个SDK集成C C++库,使他们能够更容易地创建和测试新的机器人的行为。
 robot.tv
robot.tv